Row bots
DOI: 10.1063/PT.3.3606



Rowing is a challenging sport, and not just for athletes. It mixes physiology, mechanics, and fluid dynamics, so from a physicist’s perspective, the sport is much more complex than the elegant movement of a rowing shell might suggest.
Many scientists have tried to work out the details of rowing propulsion, often with a view to improving the performance of rowing crews. For example, in a 1971 Science paper (volume 173, page 349), Thomas McMahon showed that the speed of a racing boat scales as the number of rowers to the power 1/9. In our research, we have taken a closer look at the boat speed within one rowing cycle. In a single stroke, a propulsive phase is followed by a gliding phase. As the

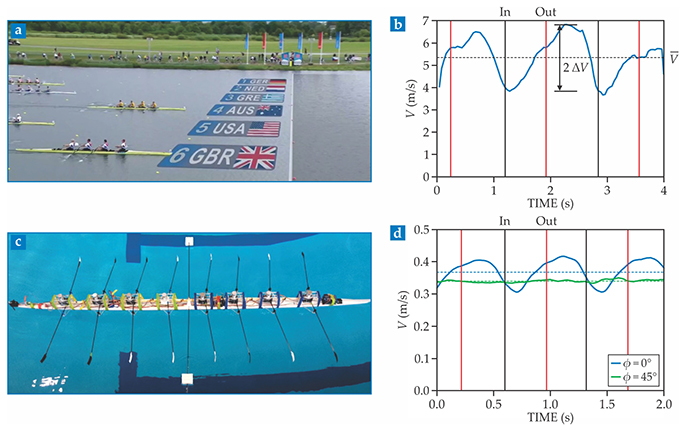
Rowing in and out of sync. Great Britain holds a slim lead over Australia (a) halfway toward its victory in the men’s four rowing final at the London 2012 Olympics. (b) The velocity V of the British boat was determined from a video of the race. The black vertical lines in the plot indicate the times at which the blades enter the water, and the red vertical lines indicate the times at which the blades are lifted out. The mean speed of the boat
OLYMPIC CHANNEL
Desynchronizing the rowers can reduce speed variations. Nature employs an out-of-sync propulsion strategy in, for example, shrimp-like krill that swim with the so-called metachronal movement of five pairs of legs that are activated in a desynchronized way. Indeed, a 2010 study by Silas Alben and colleagues published in the Journal of the Royal Society Interface (volume 7, page 1545) showed that the krill’s metachronal kinematics leads to the highest average body velocity for a given amount of work. Some fishing spiders also display unsynchronized swimming at the surface of water. Given that in rowing competitions, 2 km races are often won by less than a boat length, it’s worth considering the possible advantage of unsynchronized rowing.
Row, rOw, roW your boat
Phase-shifted rowing had been tried as early as 1929, by the London Rowing Club; you can see a video of the effort at www.youtube.com/watch?v=zQ6fxsmo3V8 . But the London club’s exercise and others conducted in the UK during the early 1930s led to indecisive results. As one reporter for the Sydney Morning Herald mused on 11 October 1933, the experiments raised the question of “whether the trifling gain is worth the loss of all the rhythm, apart from neutralising the genius of strokeship.” At the 1981 and 1982 World Rowing Championships, the Soviet women’s coxed four crew placed the coxswain (the person who steers the boat) between the two pairs so that they could row perfectly out of phase. However, on race days the crew chose to row in synchrony. Despite the full-scale trials and other studies, out-of-phase techniques never have convincingly been shown to be more or less efficient than conventional synchronized rowing.
To perform a systematic study of the influence of rower synchronization on boat speed, we built a boat at 1/10 scale with eight robotic rowers. A real racing boat with eight rowers, known as a coxed eight, has a length of about 20 m and weighs about 100 kg. Our 2-m-long model, shown in panel c of the
Which strategy is best?
We measured the speed of our rowing boat at the swimming pool of the École Polytechnique and explored how it changed as we varied the phase difference ϕ between consecutive rowers. Panel d of the
At a pace of one stroke per second, our boat moves at a mean speed close to 0.36 m/s, almost 0.2 boat length per rowing cycle. By means of comparison, real race boats travel roughly 0.45 boat length per rowing cycle in competitions. As with real boats, our model displayed large variations around its average speed—approximately 12% of the mean.
For phase-shifted rowers, we show ϕ = 45° in the
Another propulsive mechanism
Our main result thus contradicts our initial intuition that reducing velocity fluctuations would increase the mean velocity. So, luckily for rowing athletes who have trained to row synchronously, we can confirm the commonly accepted wisdom that rowing together maximizes speed.
In our initial thinking, we failed to take into account that the rowers are not stationary. Indeed, if you return to the velocity profiles in
For krill, whose tiny churning legs are always underwater, there is no such inertial boost effect. They do better with desynchronized propulsion.
Supplement: The great row bot race
In rowing races, a crew’s synchronized motion forcefully propels the rowing shell forward. But the jerky motion of the boat creates a lot of friction on the hull. Can the crew gain an advantage by rowing out of sync? The video shows two trials conducted at the École Polytechnique in Paris using a 1/10-scale boat and robot rowers. In the top panel each robot rows 45° out of phase with its neighbor. In the bottom panel the row bots simulate conventional synchronized rowing. The asynchronous rowing is smoother, but in this case, slow and steady loses the race.
References
► B. Sanderson, W. Martindale, “Towards optimizing rowing technique,” Med. Sci. Sports Exerc. 18, 454 (1986).
► A. Baudouin, D. Hawkins, “A biomechanical review of factors affecting rowing performance,” Br. J. Sports Med. 36, 396 (2002). https://doi.org/10.1136/bjsm.36.6.396
► A. J. de Brouwer, H. J. de Poel, M. J. Hofmijster, “Don’t rock the boat: How antiphase crew coordination affects rowing,” PLOS One 8, e54996 (2013). https://doi.org/10.1371/journal.pone.0054996
► V. Kleshnev, The Biomechanics of Rowing, Crowood Press (2016).
More about the authors
Jean-Philippe Boucher and Romain Labbé are PhD students in fluid mechanics at the laboratory of hydrodynamics (LadHyX) at the École Polytechnique in Paris. Christophe Clanet is a CNRS research director at LadHyX.





{kind=link}