Soft electronics with liquid-metal veins
DOI: 10.1063/PT.3.4622
Over time, nature can improve the effectiveness of its designs with adaptations that produce uniquely functional organs. Examples abound: our eyes, skin, nerve networks, and brain, all of which are built entirely from soft tissue. Despite the ubiquity of such organs, creating similarly smart robots that are also robust and deformable is an engineering challenge. Evolution transforms soft tissues into the functional organs of thriving organisms. Unfortunately, engineers aren’t given millions of years to refine their work. Instead, a common approach is to look to nature for inspiration.
Take the octopus, for example. Its eight strong, deformable arms are capable of complicated and independent tasks, such as capturing prey and opening jars while remaining coordinated and untangled. Indeed, research has shown that the animal can even respond to stimuli—and by some accounts capture and deliver prey to a location where its mouth would be—even after being decapitated. That behavior is possible because the majority of the octopus’s neurons are distributed throughout its arms, which allows it to sense and react locally.
A lot can be learned by trying to replicate the octopus’s features. By sensing and responding to stimuli locally, robots could simplify more difficult tasks, such as balancing mammal-like on feet or slithering snake-like across a desert, while reducing the computational load on central processors needed to decipher visual cues, make decisions, and store memories.
However, distributing sensors and actuators throughout a synthetic device can be complicated. Electronics and wires are usually bulky and stiff, and replicating the nervous system of an organism may require covering a robot’s entire surface. But what if a robot could sense and respond to stimuli locally while remaining deformable and adaptive to its environment? This Quick Study explores one approach researchers are following to make just such devices.
Liquid-metal veins
An octopus’s adaptability comes largely from its ability to deform elastically. Because of recent advances, it’s now possible to create thin and flexible sensors that connect wirelessly to a computer. Used in medicine, they can be applied to patients’ skin like a bandage—in some cases adhering via van der Waals forces alone—flexing with a patient’s movement and increasing comfort (see Physics Today, May 2019, page 16 ). Even so, flexible sensors may still not be as deformable and adaptable as human skin or an octopus’s arm. For electronics to mimic all the deformation modes of an animal, they need to be soft and stretchable in addition to being thin and flexible.
To appreciate the distinction between flexible and stretchable, consider aluminum foil. Because it is only 0.01–0.02 mm thick, foil is easily bent and crumpled, but it cannot stretch without permanently deforming. Soft polymers like silicone have been used as the base of some electronic devices for years now—just as a silicon wafer is the base for computer chips. But polymers are typically insulators, and incorporating wires and solid-state electronics in a deformable system isn’t easy (see Physics Today, March 2017, page 14 ).
Engineers have proposed other approaches, such as reformulating the polymer’s composition. By blending carbon nanotubes, liquid-metal droplets, or some other conductive particles into the elastic material, microscopic conductive wiring can form through a process called percolation (see Physics Today, October 2008, page 18 ). Including a high enough concentration of conductive particles in the polymer produces winding channels that allow electrical current to travel through its bulk. Although such systems are promising for some applications, they don’t conduct electricity as well as traditional wiring. What’s more, the polymer’s elasticity drops when the particles are added.
This past year a different approach was proposed by a research group led by chemical engineer Michael Dickey from North Carolina State University. The group paired a metal alloy made of gallium and indium that is liquid at room temperature (above 15.7 °C) with a soft skeleton made of polydimethylsiloxane (PDMS)—the chemical equivalent of bathtub caulk. The liquid metal allows current to flow through the polymer, just as it would flow through a circuit. But unlike a conventional wire, the alloy’s liquidity allows the veins to stretch and twist with the PDMS they’re embedded in.
That design did not come without complications, as changing the shape of the conducting veins altered the resistance of the wire. However, the variable resistance turned out to be useful in both sensing stimuli and providing local responses. The researchers demonstrated a simple device that could perform logical operations independent of a central processor. In that sense, much like an octopus arm, the device straddled the line between computer and soft robot.
Tuning resistance through shape
When an elastic band is stretched in one direction, it contracts in the other to conserve volume. That principle also extends to other types of deformations, such as bending and compressing, and to materials, such as polymers and metals. Stretching a liquid-metal wire makes it thinner, increases its electrical resistance, and thus increases the power dissipated by a constant current. The power dissipation leads to local heating, and that Joule heating is how Dickey and coworkers observed the change in resistance in their liquid-metal wires.
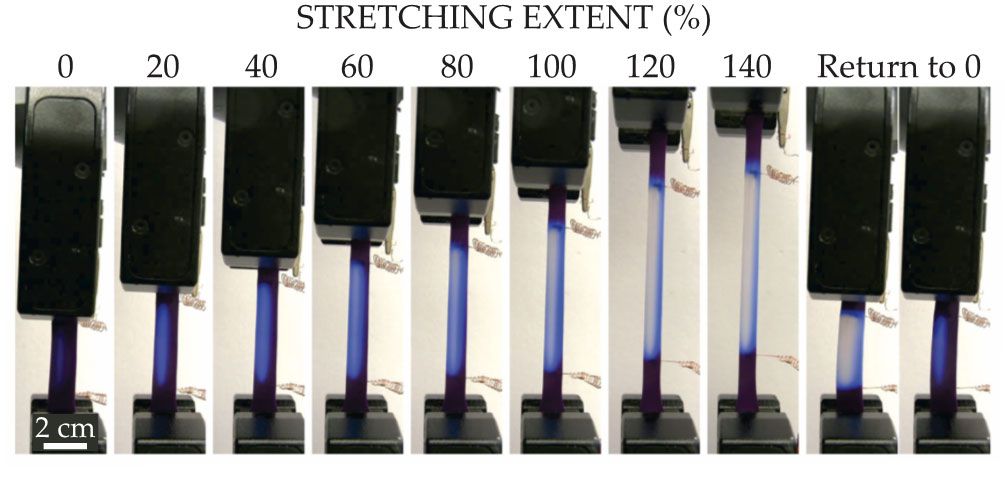
By measuring the local heating as a wire is deformed, the researchers determined the resistance along it. The trick was to incorporate a temperature-sensitive pigment into the PDMS and monitor the change in color as a stand-in for temperature, and thus resistance, in the elongating region. It’s possible to tune devices by adjusting the initial resistance, so that the color change happens at a particular strain. Figure
Figure 1.

Thermo/mechanochromism. Stretching a liquid-metal-filled polymer wire narrows its width and thus its electrical resistance. Photographs of the stretched wire reveal the concomitant Joule heating as a color change—from purple to white—as current is held constant but current density rises. In the two panels on the far right, the wire returns to its original shape and resistance. (Image adapted from Y. Jin et al., Nat. Commun. 10, 4187, 2019.)
Thinking by feel
Some simple computers can be built exclusively with Boolean operations, which apply conditional statements to a set of inputs in a truth table and return a true or false response. For example, the output of an AND operation yields “true” if both inputs are true and “false” if either (or both) of them are false. Although deformation-sensitive veins are capable of continuous changes in resistance, they can also be used to carry true or false signals by controlling the resistance at different locations, as shown in figure
Figure 2.

Figure 2. This logic gate is made from liquid metal embedded in pigment-treated polymer wires. (a) Regions A and B are pressure sensors, and C presents the visual response to truth-table options. (b) Responses depend on whether A and B are pressed (1) or not (0). The resistance in the compressible wires connecting A and B determines which color appears at C. (Figure adapted from Y. Jin et al., Nat. Commun. 10, 4187, 2019.)
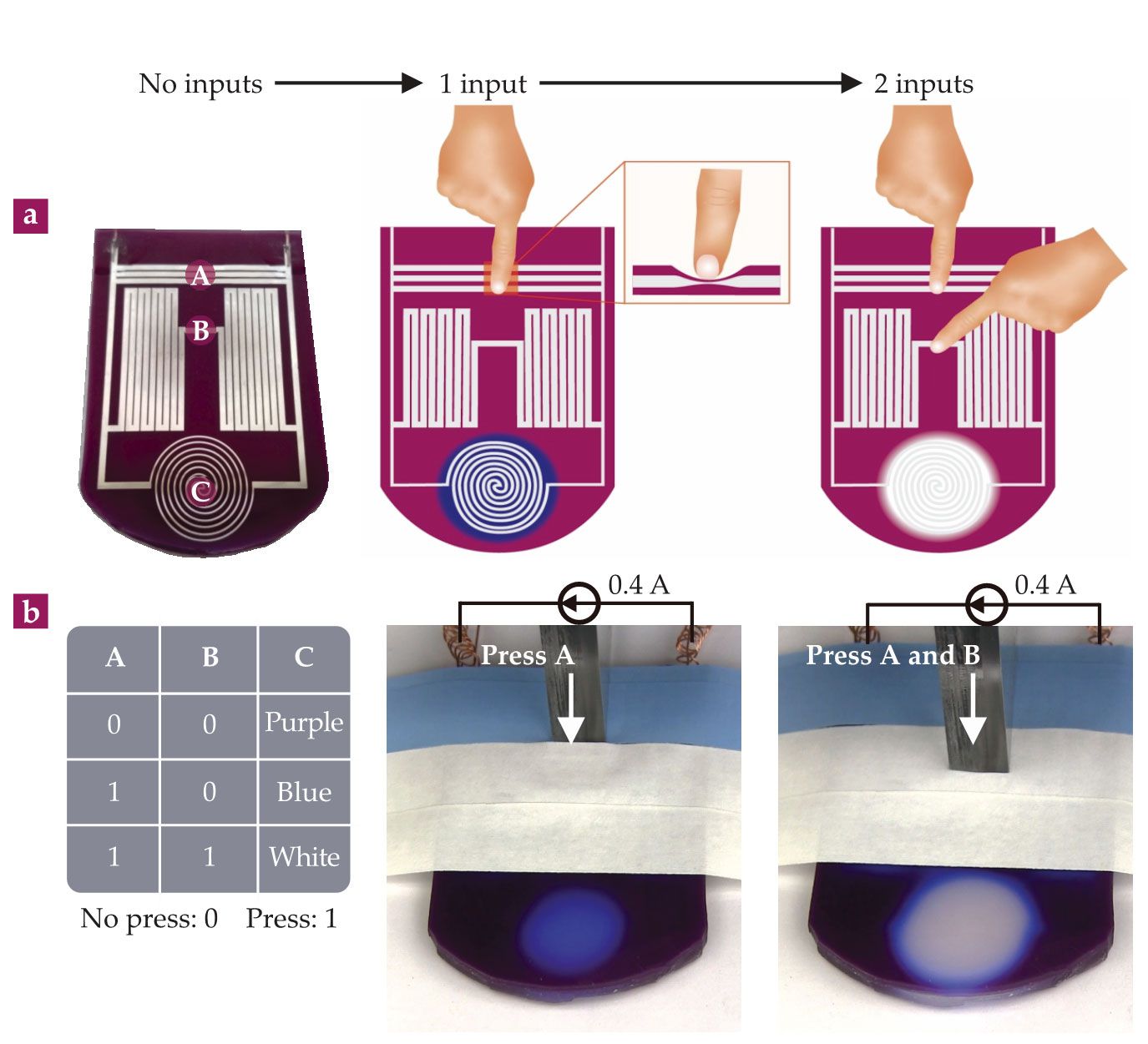
Pressing A or B will increase the resistance at those points and redirect current into C, which is observed as a change in either temperature or color. The device can take two inputs and create one of three responses, independent of any processor. Although the device’s output is limited to color, many materials expand, contract, or change their shape in response to heating. Combining certain materials can create many mechanical feedback loops. Imagine the foot of a robot, whose skin could sense and respond to changes in pressure. As the robot moves or the ground shifts, tiny adjustments could be made to the foot to stabilize the robot’s balance. The result is not a robotic octopus, but by combining our understanding of solid-state electronics with soft materials, we could soon be seeing devices approach the capabilities of the organic ones that nature already makes.
References
► T. Hague, M. Florini, P. L. R. Andrews, “Preliminary in vitro functional evidence for reflex responses to noxious stimuli in the arms of Octopus vulgaris,” J. Exp. Mar. Biol. Ecol. 447, 100 (2013). https://doi.org/10.1016/j.jembe.2013.02.016
► P. Ehrlich, J. Reed, dir., My Octopus Teacher, Netflix (2020).
► F. Angelini et al., “Decentralized trajectory tracking control for soft robots interacting with the environment,” IEEE Trans. Robot. 34, 924 (2018). https://doi.org/10.1109/TRO.2018.2830351
► Y. Jin et al., “Materials tactile logic via innervated soft thermochromic elastomers,” Nat. Commun. 10, 4187 (2019). https://doi.org/https://doi.org/10.1038/s41467-019-12161-1
More about the authors
Adam Fortais is a doctoral candidate studying the physics of soft matter at McMaster University in Hamilton, Ontario, Canada.





{kind=link}
{kind=link}